 Service Robot
Service Robot
In hospitals, offices and other public spaces, medication, keys, and other small items might need to be carried from one place to the other. In this scenario, people may prefer to focus on more difficult tasks, and a low cost robot may carry small items.
Aim
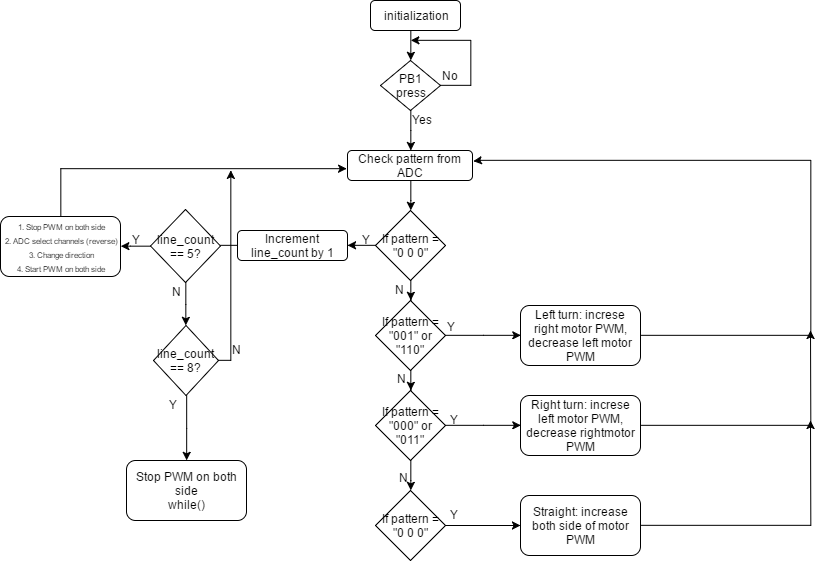
This project took place as part of an undergraduate robotic design course. In a team of 4, we designed an autonomous robot that follows a figure-of-8 line traced on the floor, first forwards, then in reverse. An STM32 microcontroller was used and programmed in C to steer the motors from the line sensor input. Sensors were required on the front and back for forward and reverse steering.
Time-bound
2 months development in a team of 4, in a very busy 3rd year of engineering. I acted as Head of Mechanical Design and Integration of Circuitry.
Limitations
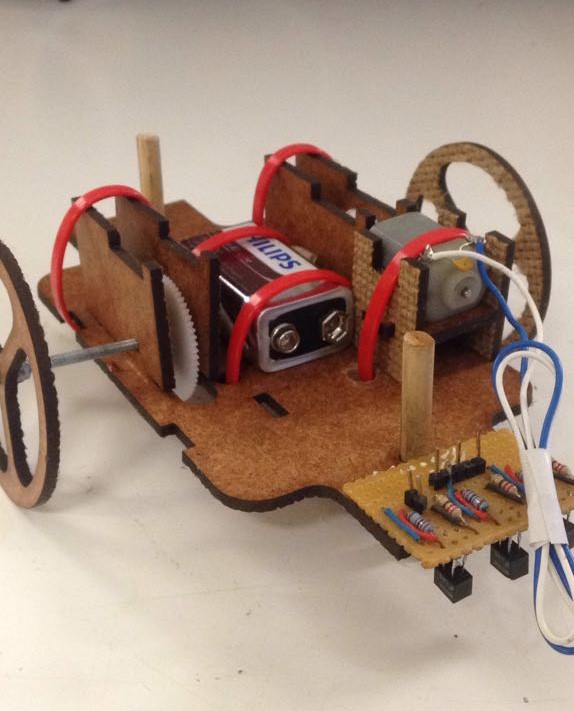
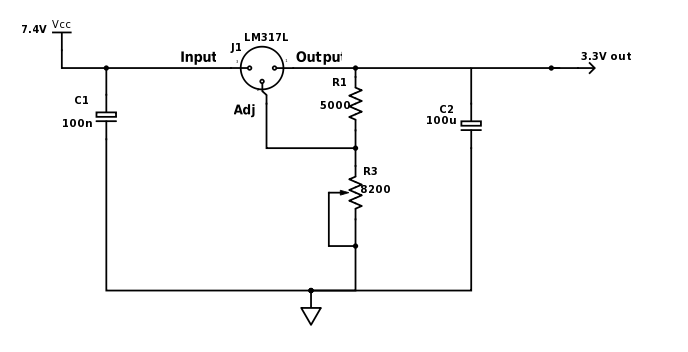
The main challenge was to have the final prototype cost less than R100 (+-$7), excluding the 8V battery. This meant that custom parts were to be built (namely custom electronics as shown below, custom coupling of gears instead of a gearmotor, and a custom robot frame).
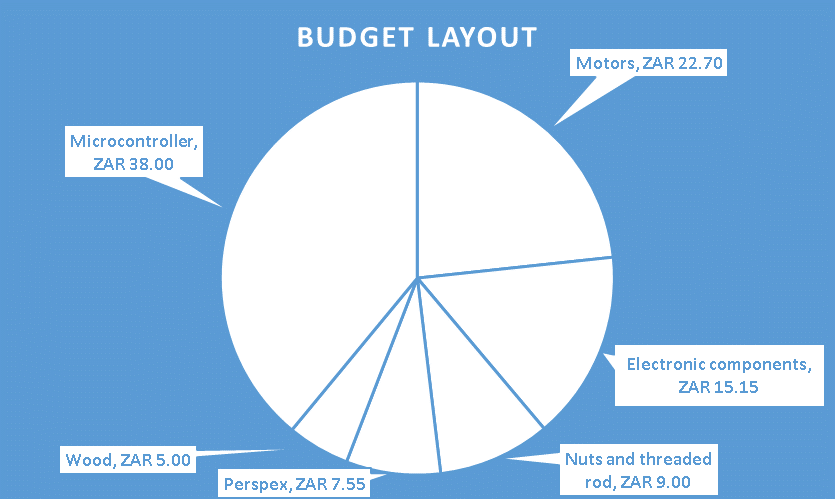
This project involved careful design and rapid prototyping of the chassis, requiring hands-on design and development. The design was further optimised for low cost as can be seen below.
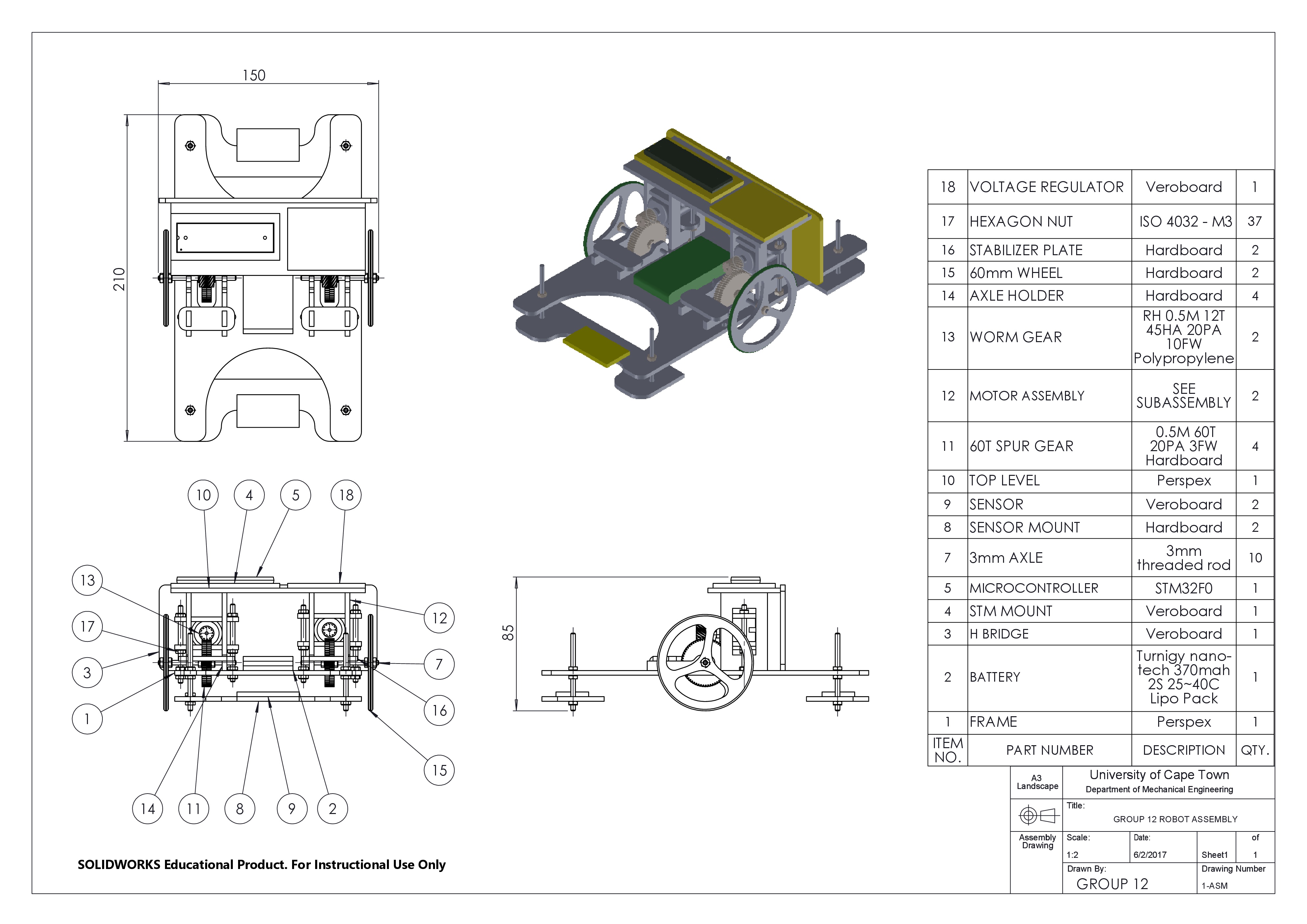
Mechanical design
What follows are the technical drawings, software and an optimized mechanical structure.
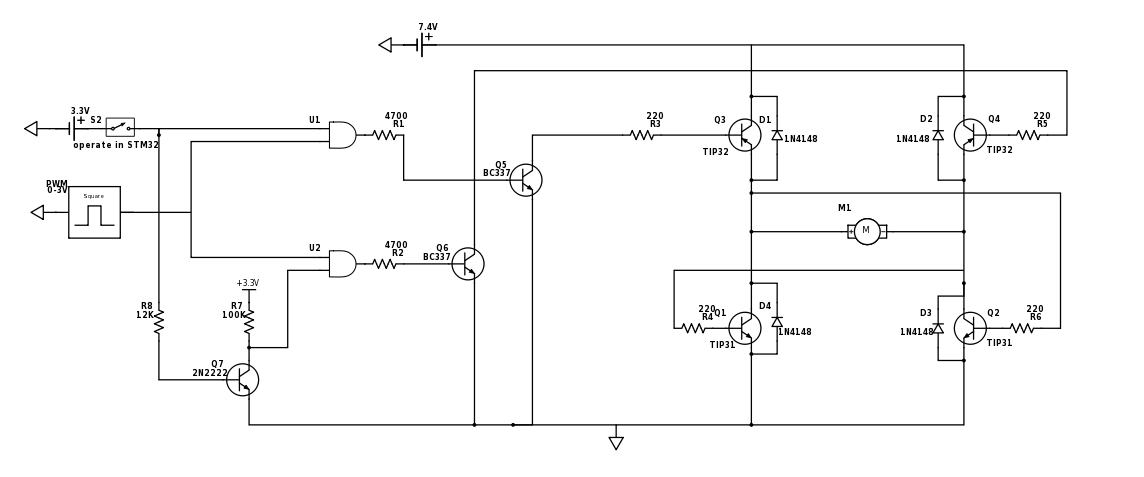
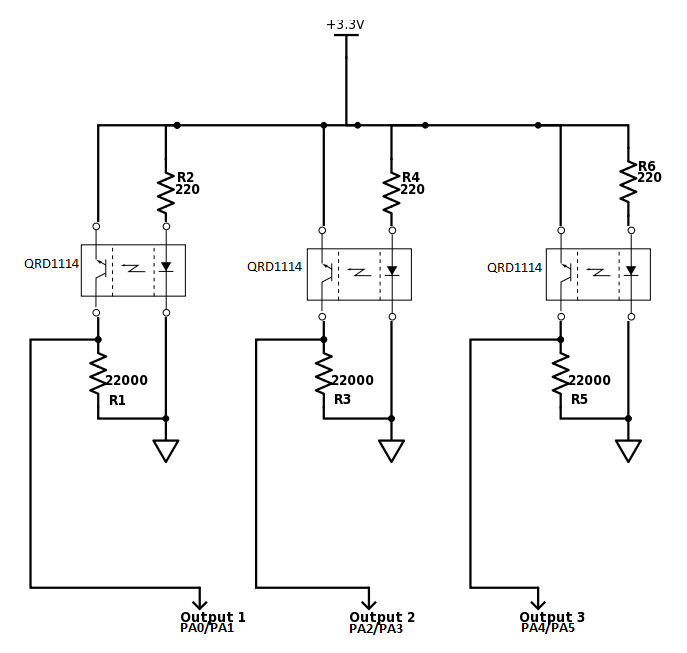
Electronics
Limitation: the local UCT lasercutters did not do a good job on cutting our gears. It turned out that it was not accurate enough.
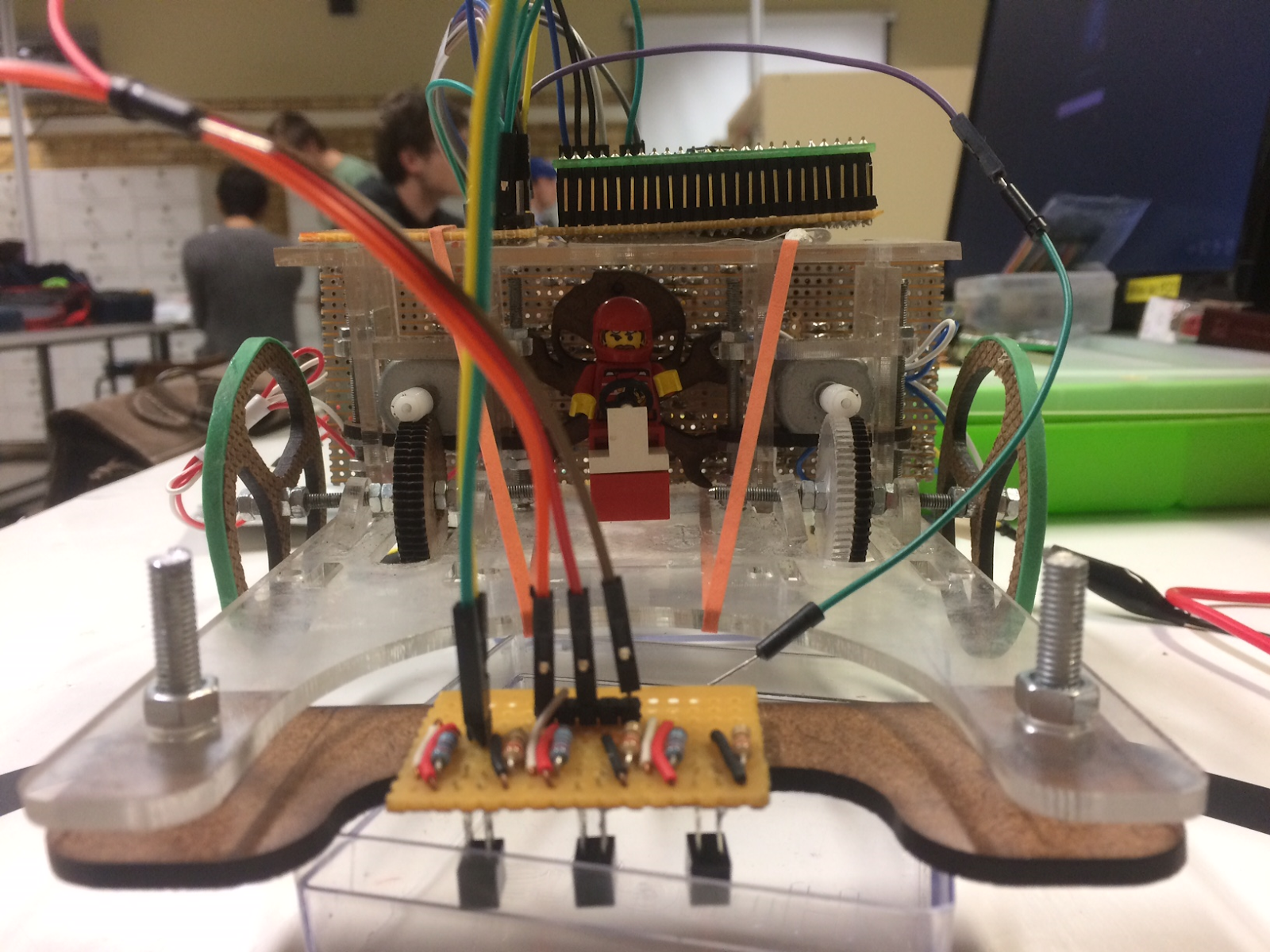
Mechanical optimisation
I later went and improved the chassis.